Self-driving cars, once a futuristic vision, are rapidly becoming a reality, transforming the way we perceive transportation. At the heart of this revolution lies image processing, a powerful technology that enables self-driving cars to perceive and understand their surroundings. In this blog, we will explore the role of image processing in free area detection, a critical aspect of self-driving car navigation.
The Importance of Free Area Detection
Free area detection, also known as drivable area detection, is the process of identifying the open spaces on the road where a self-driving car can safely maneuver. This is crucial for autonomous navigation, as it allows the car to plan its path, avoid obstacles, and maintain a safe distance from other vehicles and pedestrians.
How Image Processing Works in Free Area Detection
Image processing algorithms play a central role in free area detection by analyzing real-time images captured by cameras mounted on the self-driving car. The process involves several steps:
- Image Acquisition
- Cameras capture continuous images of the road ahead, providing a visual representation of the environment.
- Pre-processing
- The captured images are pre-processed to enhance their quality and remove noise, improving the accuracy of subsequent processing steps.
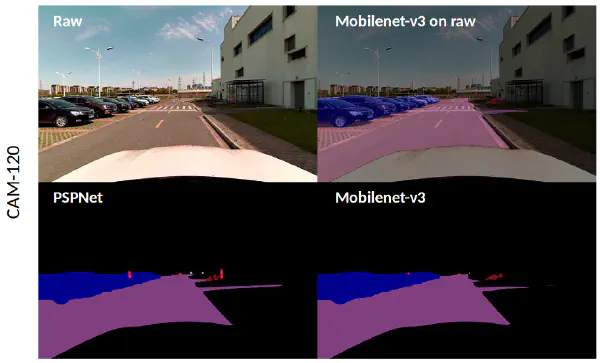
- Segmentation
- Image segmentation techniques are applied to separate the road surface from other objects, such as vehicles, pedestrians, and roadside structures.
- Free Area Identification
- The segmented road surface is further analyzed to identify the drivable areas, taking into account lane markings, road boundaries, and potential obstacles.
- Real-time Mapping
- The identified free areas are mapped onto the car’s internal representation of the environment, providing a dynamic understanding of the available space for navigation.
Benefits of Image Processing for Free Area Detection
Image processing offers several advantages for free area detection in self-driving cars:
- Accuracy and Precision
- Image processing algorithms can accurately identify and delineate free areas, even in complex and dynamic environments.
- Real-time Performance
- Image processing enables real-time detection of free areas, allowing the self-driving car to react promptly to changes in the environment.
- Adaptability to Various Conditions
- Image processing techniques can adapt to different lighting conditions, weather, and road types, ensuring reliable free area detection in diverse scenarios.
Challenges of Image Processing for Free Area Detection
Despite its benefits, image processing for free area detection faces certain challenges:
- Varying Lighting and Weather
- Extreme lighting conditions, such as bright sunlight or nighttime, and adverse weather conditions can affect the accuracy of image segmentation and free area identification.
- Occlusion and Cluttered Environments
- Occlusion by objects or complex environments with numerous obstacles can pose challenges for accurately detecting free areas.
- Computational Complexity
- Real-time image processing requires efficient algorithms and adequate computational resources to maintain the responsiveness needed for safe navigation.
Conclusion
Image processing has emerged as a crucial technology for free area detection in self-driving cars, enabling them to perceive and understand the available space for navigation. As image processing techniques continue to advance, self-driving cars will become increasingly capable of navigating complex environments safely and efficiently, paving the way for a future of autonomous transportation.